Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (7): 2183-2191.doi: 10.12305/j.issn.1001-506X.2023.07.29
• Guidance, Navigation and Control • Previous Articles Next Articles
Robust sliding mode observer design for nonlinear system with measurement noise and multiple faults
Cong LIU1,*, Kaijun LIAO1, Kun QIAN1, Yinghui LI2, Qi DING1
- 1. School of Aeronautics Maintenance Noncommissioned Officers, Air Force Engineering University, Xinyang 464000, China
2. Aeronautics Engineering College, Air Force Engineering University, Xi'an 710038, China
-
Received:2022-01-12Online:2023-06-30Published:2023-07-11 -
Contact:Cong LIU
CLC Number:
Cite this article
Cong LIU, Kaijun LIAO, Kun QIAN, Yinghui LI, Qi DING. Robust sliding mode observer design for nonlinear system with measurement noise and multiple faults[J]. Systems Engineering and Electronics, 2023, 45(7): 2183-2191.
share this article
Fig.1
Curve diagram of the state vector x1 and estimate $ \hat{x}_1$"
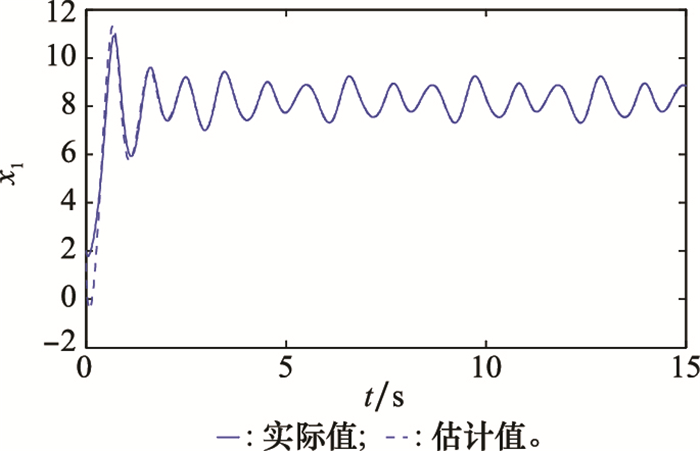
Fig.2
Curve diagram of the state vector x2 and estimate $ \hat{x}_2$"
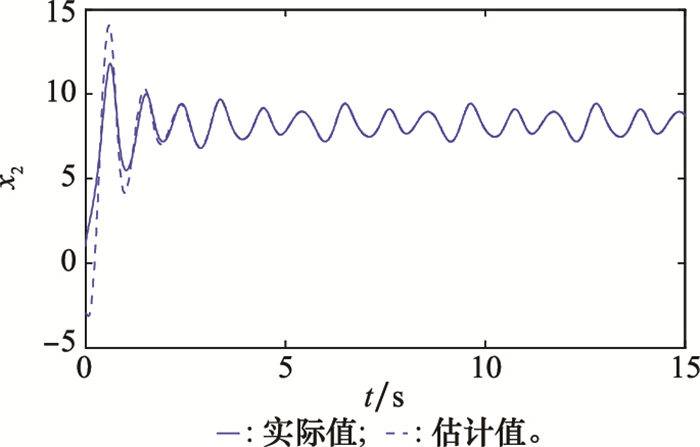
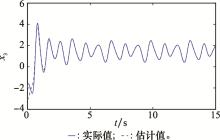
Fig.3
Curve diagram of the state vector x3 and estimate $ \hat{x}_3$"
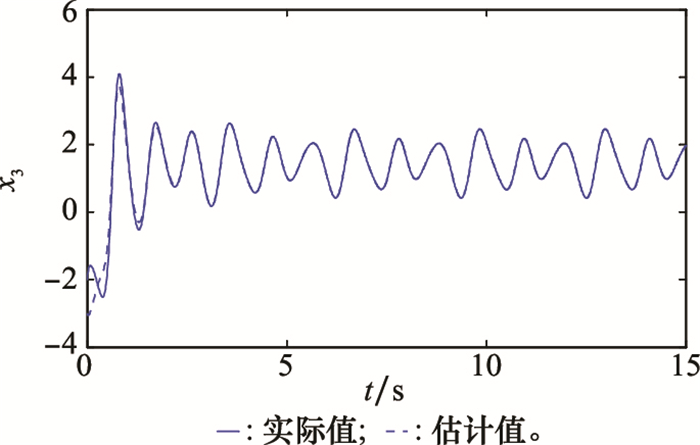
Fig.4
Convergence curve diagram of the adaptive law $\hat{\alpha}$"
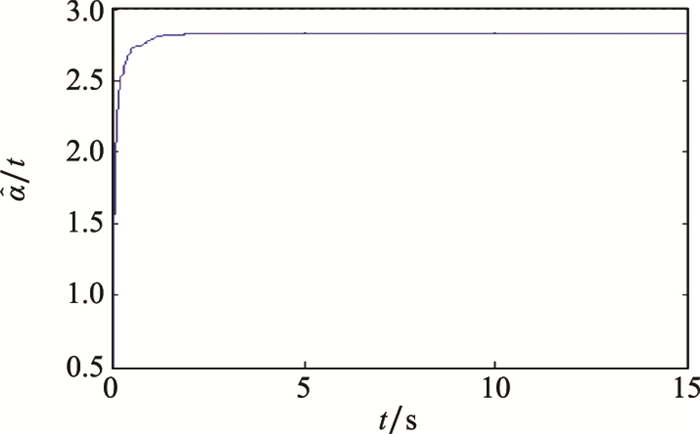
Fig.5
Convergence curve diagram of the adaptive law $ \hat{\beta}$"
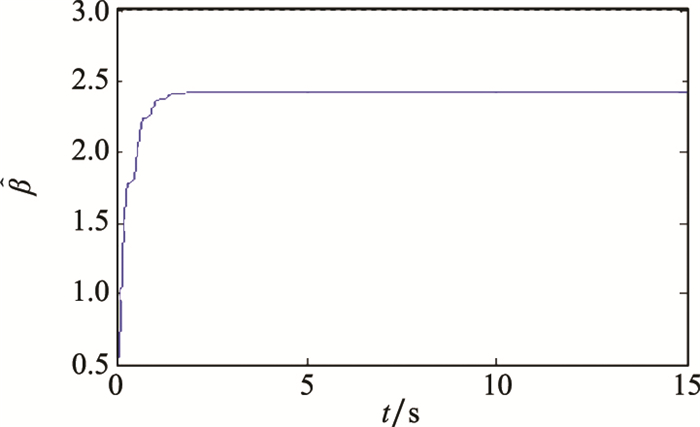
Fig.6
Sensor fault reconstructed results based on the method proposed in [15]"
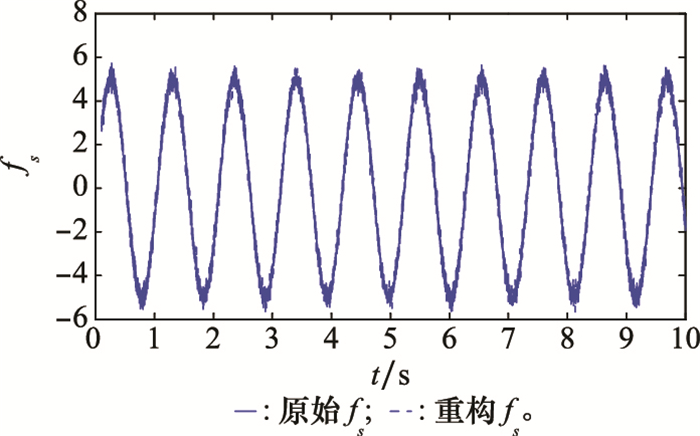
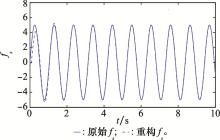
Fig.7
Sensor fault reconstructed results based on the method proposed in this paper"
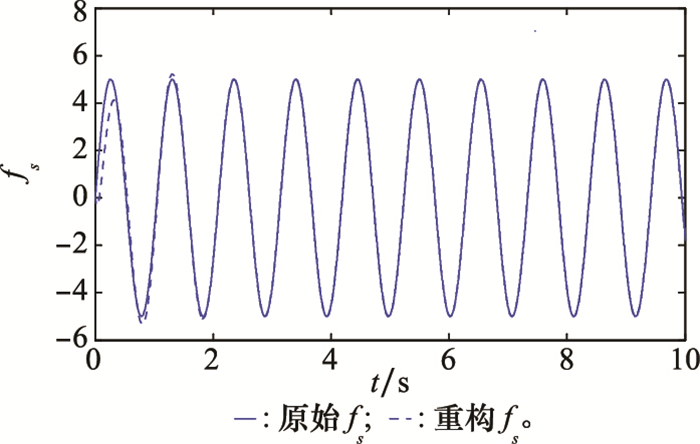
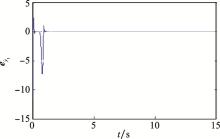
Fig.8
Curve diagram of the estimate error of the output vector differential $\boldsymbol{e}_{\boldsymbol{\dot{y}}_1}$"
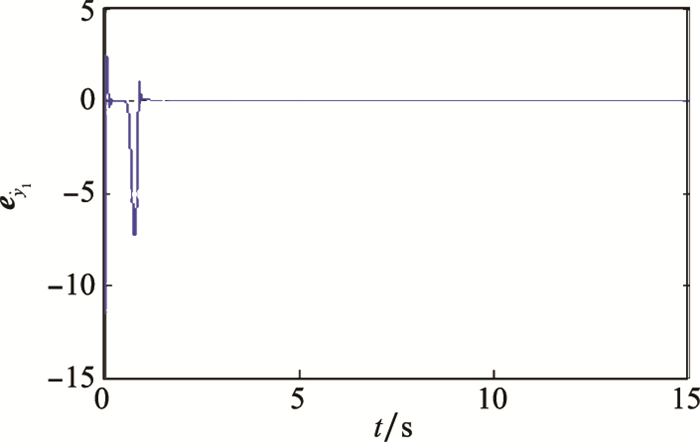
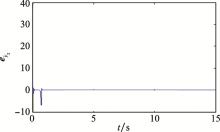
Fig.9
Curve diagram of the estimate error of the output vector differential $\boldsymbol{e}_{\boldsymbol{\dot{y}}_2}$"
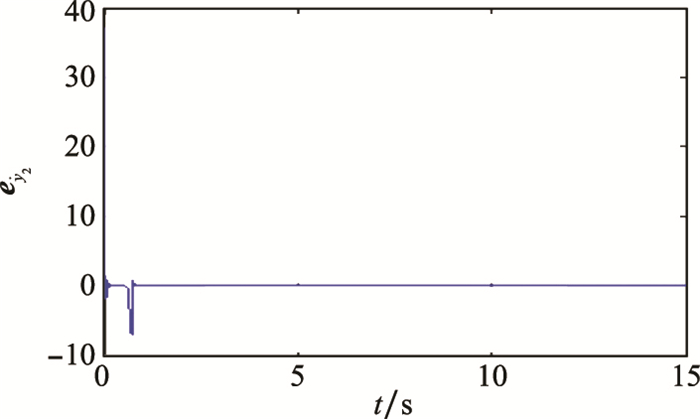
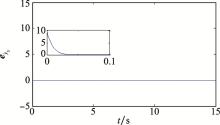
Fig.10
Curve diagram of the estimate error of the output vector differential $\boldsymbol{e}_{\boldsymbol{\dot{y}}_3}$"
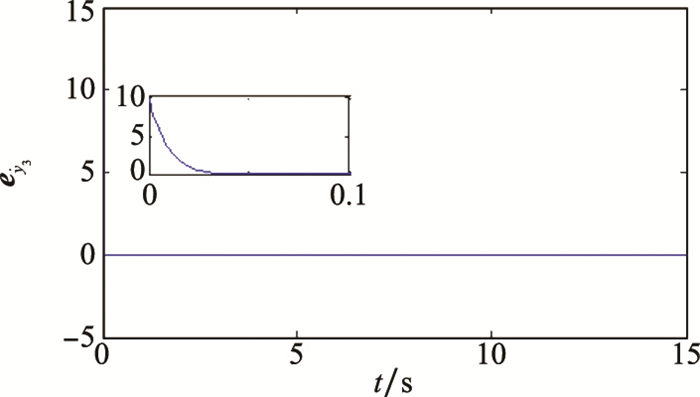
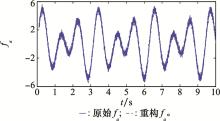
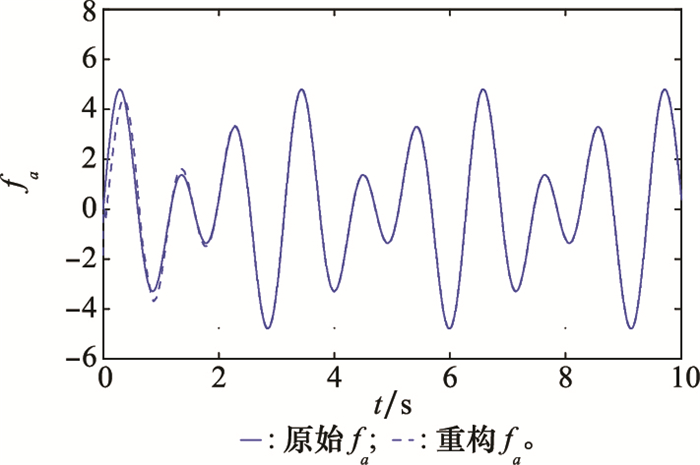
Fig.11
Actuator fault reconstructed results based on the method proposed in this paper"
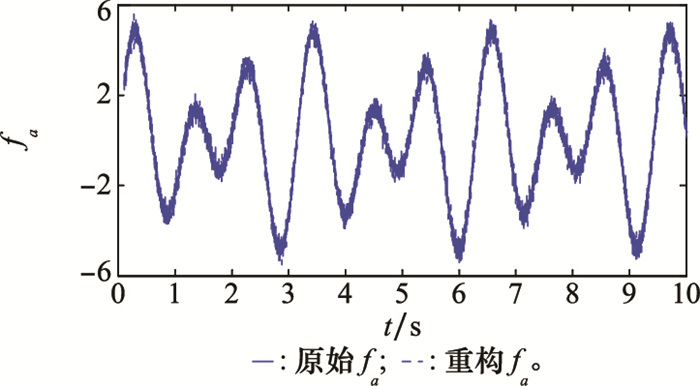
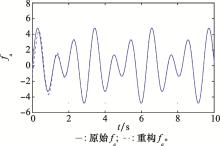
Fig.12
Actuator fault reconstructed results based on the method proposed in [15]"
| 1 |
DONG H L , HOU N , WANG Z D . Fault estimation for complex networks with randomly varying topologies and stochastic inner couplings[J]. Automatica, 2020, 112, 108734.
doi: 10.1016/j.automatica.2019.108734 |
| 2 | ZHAO D , LI Y Y , CHOON K A , et al. Optimal state and fault estimation for two-dimensional discrete systems[J]. Automatica, 2020, 118, 108856. |
| 3 |
MOJTABA H , CHEE P T . Integrated fault estimation and fault tolerant control for systems with generalized sector input nonli-nearity[J]. Automatica, 2020, 119, 109098.
doi: 10.1016/j.automatica.2020.109098 |
| 4 | JOVAN S , DANI J . Fault-tolerant control in presence of disturbances based on fault estimation[J]. Systems & Control Letters, 2020, 138, 104646. |
| 5 |
CHEN X Q , SUN R , LIU M , et al. Two-stage exogenous Kalman filter for time-varying fault estimation of satellite attitude control system[J]. Journal of the Franklin Institute, 2020, 357 (4): 2354- 2370.
doi: 10.1016/j.jfranklin.2019.11.078 |
| 6 | LI X H , ZHANG W D . Integrated finite-time fault estimation and fault-tolerant control for Markovian jump systems with generally uncertain transition rates[J]. Journal of the Franklin Institute, 2019, 7 (6): 12- 23. |
| 7 | HARDY L P P , TIAGO R O , LIU H . Sliding mode observer for fault reconstruction of time-delay and sampled-output systems-a time shift approach[J]. Automatica, 2019, 106 (1): 390- 400. |
| 8 | 刘聪, 李颖晖, 吴辰, 等. 基于鲁棒自适应滑模观测器的多故障重构[J]. 控制与决策, 2016, 31 (7): 1219- 1224. |
| LIU C , LI Y H , WU C , et al. Design of the robust adaptive sliding mode observer for multiple fault reconstruction[J]. Control and Decision, 2016, 31 (7): 1219- 1224. | |
| 9 |
SAMI M , PATTON R J . Active fault tolerant control for nonlinear systems with simultaneous actuator and sensor faults[J]. International Journal of Control, Automation, and Systems, 2013, 11 (6): 1149- 1161.
doi: 10.1007/s12555-013-0227-1 |
| 10 |
SHEN Y , YANG H Y , OKYAY K . Sliding mode observer-based FTC for Markovian jump systems with actuator and sensor faults[J]. IEEE Trans.on Automatic Control, 2017, 62 (7): 3551- 3558.
doi: 10.1109/TAC.2017.2669189 |
| 11 |
YANG J Q , ZHU F L , WANG X . Robust sliding-mode observer-based sensor fault estimation, actuator fault detection and isolation for uncertain nonlinear systems[J]. International Journal of Control, Automation, and Systems, 2015, 13 (5): 1037- 1046.
doi: 10.1007/s12555-014-0159-4 |
| 12 | LI X H , LU D K , ZENG G H , et al. Integrated fault estimation and non-fragile fault-tolerant control design for uncertain Takagi-Sugeno fuzzy systems with actuator fault and sensor fault[J]. IET Control Theory & Applications, 2017, 11 (10): 1542- 1553. |
| 13 | CHEN L H , LIU M , FU S . Adaptive sliding mode control for stochastic jump systems against sensor and actuator failures[J]. IET Control Theory & Applications, 2016, 10 (16): 2000- 2009. |
| 14 |
THABET A , FREJ H , BOUTAYEB M . Observer-based feedback stabilization for Lipschitz nonlinear systems with extension to H∞ performance analysis: design and experimental results[J]. IEEE Trans.on Control Systems Technology, 2018, 26 (1): 321- 328.
doi: 10.1109/TCST.2017.2669143 |
| 15 | ZHANG W , SU H S , LIANG Y , et al. Non-linear observer design for one-sided Lipschitz systems: an linear matrix inequality approach[J]. IET Control Theory & Applications, 2012, 6 (9): 1297- 1303. |
| 16 | GU Y , YANG G H . Simultaneous actuator and sensor fault estimation for discrete-time Lipschitz nonlinear systems in finite-frequency domain[J]. Optimal Control Applications & Methods, 2018, 39 (3): 410- 423. |
| 17 | DHOUHA K , HAMDI G , AHMED E H , et al. Adaptive fuzzy observer-based fault-tolerant control for Takagi-Sugeno descriptor nonlinear systems with time delay[J]. Circuits, Systems, and Signal Processing, 2018, 37 (6): 1542- 1561. |
| 18 | LI M , ZHANG Y C , GENG Y H . Fault-tolerant sliding mode control for uncertain active suspension systems against simultaneous actuator and sensor faults via a novel sliding mode observer[J]. Optimal Control Applications and Methods, 2018, 39 (2): 1727- 1749. |
| 19 | TAN C P, EDWARDS C, KUANG Y. Robust sensor fault reconstruction using right eigenstructure assignment[C]//Proc. of the IEEE International Workshop on Electronic Design, Test and Applications, 2006: 435-440. |
| 20 | KOK Y N , TAN C P , OETOMO D . Disturbance decoupled fault reconstruction using cascaded sliding mode observers[J]. Automatica, 2012, 48 (7): 794- 799. |
| 21 | 刘聪, 李颖晖, 朱喜华, 等. 基于自适应滑模观测器的不匹配非线性系统执行器故障重构[J]. 控制理论与应用, 2014, 31 (4): 431- 437. |
| LIU C , LI Y H , ZHU X H , et al. The adaptive sliding mode observer for the actuator fault reconstruction of nonlinear system with mismatched uncertainties[J]. Control Theory & Application, 2014, 31 (4): 431- 437. | |
| 22 | LEVANT A . High-order sliding modes: differentiation and output feedback control[J]. International Journal of Control, 2003, 76 (10): 427- 434. |
| [1] | Zhikai LIN, Weijian LIU, Lichang QIAN, Binbin LI, Bilei ZHOU, Zhaojian ZHANG, Hao CHEN. A weighted adaptive detector for mismatched subspace signal detection [J]. Systems Engineering and Electronics, 2023, 45(7): 1974-1980. |
| [2] | Jiazheng PEI, Yong HUANG, Baoxin CHEN, Jian GUAN, Xiaolong CHEN. Multi-waveform adaptive pulse compression for range sampling mismatch [J]. Systems Engineering and Electronics, 2023, 45(7): 2031-2042. |
| [3] | Jun YOU, Ke ZHANG, Zhiguo HAN, Tianxing CAI, Cheng ZHANG. Three-dimensional super-twisting slide mode cooperative guidance law with line-of-sight angle constraint [J]. Systems Engineering and Electronics, 2023, 45(7): 2138-2149. |
| [4] | Xiangyu WANG, Yanyu ZHANG, Long LI, Chunxiao JIAN, Weijia CUI. Weighted clustering algorithm based on adaptive fruit fly optimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(7): 2259-2268. |
| [5] | Chunfeng DING, Jianjun WANG. Robust parameter design based on Kriging model [J]. Systems Engineering and Electronics, 2023, 45(7): 2269-2279. |
| [6] | Zhehao WANG, Tao JIAN, Xiaodong HUANG, Haipeng WANG, Yu LIU. HRRP recognition method for sea surface targets based on angular domain feature PSO [J]. Systems Engineering and Electronics, 2023, 45(6): 1642-1650. |
| [7] | Jianting FENG, Tong WANG, Jun DING, Tong LU. Data reorganization space-time adaptive processing method for airborne broadband radar [J]. Systems Engineering and Electronics, 2023, 45(6): 1675-1683. |
| [8] | Zehao YE, Hao CHEN, Shengxiang ZHOU, Yawei SONG, Yan GAO, Zhihui YU. Adaptive UKF based on singular value decomposition to reentry glide target tracking [J]. Systems Engineering and Electronics, 2023, 45(5): 1503-1511. |
| [9] | Xiaoying CHEN, Jianjun WANG, Shijuan YANG. Bayesian modeling and optimization based on semi-parametric hierarchy [J]. Systems Engineering and Electronics, 2023, 45(5): 1580-1588. |
| [10] | Ji SHEN, Xianrong WAN, Jianxin YI, Yan LIU, Feng CHENG. Robust adaptive beamforming in complex interference scenarios [J]. Systems Engineering and Electronics, 2023, 45(4): 941-949. |
| [11] | Yun ZHONG, Lujun WAN, Peiyang YAO, Jieyong ZHANG. Measurement and optimization of generation and evolution of agile C2 organization [J]. Systems Engineering and Electronics, 2023, 45(4): 1090-1097. |
| [12] | Qingyuan ZHAO, Zhiqiang ZHAO, Chunmao YE, Yaobing LU. Micro-motion fusion recognition of double band early warning radar based on self-attention mechanism [J]. Systems Engineering and Electronics, 2023, 45(3): 708-716. |
| [13] | Yan MA, Jianjun WANG, Zebiao FENG. Bayesian modeling and optimization of robust parametric design with non-normal response [J]. Systems Engineering and Electronics, 2023, 45(3): 921-930. |
| [14] | Junling ZHANG, Mei DONG, Baixiao CHEN. Sea clutter suppression algorithm based on tunable Q-factor wavelet transform [J]. Systems Engineering and Electronics, 2023, 45(2): 343-351. |
| [15] | Youran XIA, Jun GUAN, Wenjun YI. Projectile parameter identification: extreme learning machine optimized by improved particle swarm [J]. Systems Engineering and Electronics, 2023, 45(2): 521-529. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||