Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (1): 127-138.doi: 10.12305/j.issn.1001-506X.2023.01.16
• Systems Engineering • Previous Articles
Multi-UAV cooperative mission planning considering subsystem execution capability
Hongyun ZHANG1, Lei WANG1, Xu ZHANG1, Yu DING2,3,4, Chen LYU2,3,4, Xinwei WANG5,6,*
- 1. School of Mathematical Science, Dalian University of Technology, Dalian 116024, China
2. Science and Technology on Reliability and Environmental Engineering Laboratory, Beijing 100191, China
3. Institute of Reliability Engineering, Beihang University, Beijing 100191, China
4. School of Reliability and Systems Engineering, Beihang University, Beijing 100191, China
5. Department of Engineering Mechanics, Dalian University of Technology, Dalian 116023, China
6. State Key Laboratory of Structural Analysis for Industrial Equipment, Dalian University of Technology, Dalian 116023, China
-
Received:2021-10-04Online:2023-01-01Published:2023-01-03 -
Contact:Xinwei WANG
CLC Number:
Cite this article
Hongyun ZHANG, Lei WANG, Xu ZHANG, Yu DING, Chen LYU, Xinwei WANG. Multi-UAV cooperative mission planning considering subsystem execution capability[J]. Systems Engineering and Electronics, 2023, 45(1): 127-138.
share this article
Table 1
Capability matrix of unmanned aerial vehicles %"
| 无人机 | 能力值 | ||
| 识别 | 攻击 | 评估 | |
| U1 | 60 | 30 | 70 |
| U2 | 50 | 60 | 80 |
| U3 | 90 | 20 | 50 |
| U4 | 40 | 60 | 70 |
| U5 | 30 | 70 | 50 |
Table 2
Capability requirements matrix of targets %"
| 目标 | 最低能力值需求 | ||
| 识别 | 攻击 | 评估 | |
| T1 | 60 | 40 | 30 |
| T2 | 50 | 20 | 50 |
| T3 | 20 | 60 | 30 |

Fig.1
Hunting process of wolves"
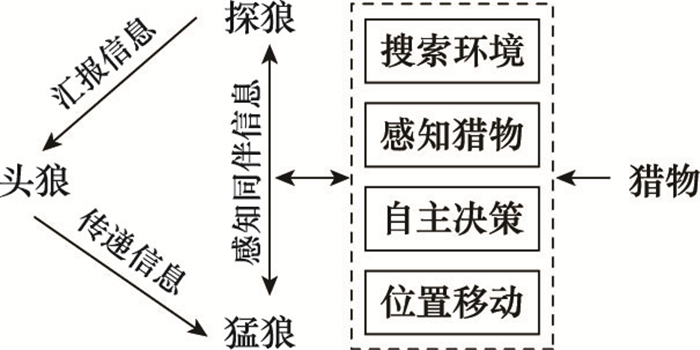
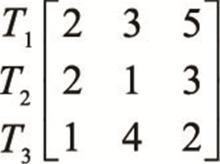
Fig.2
Task assignment matrix"
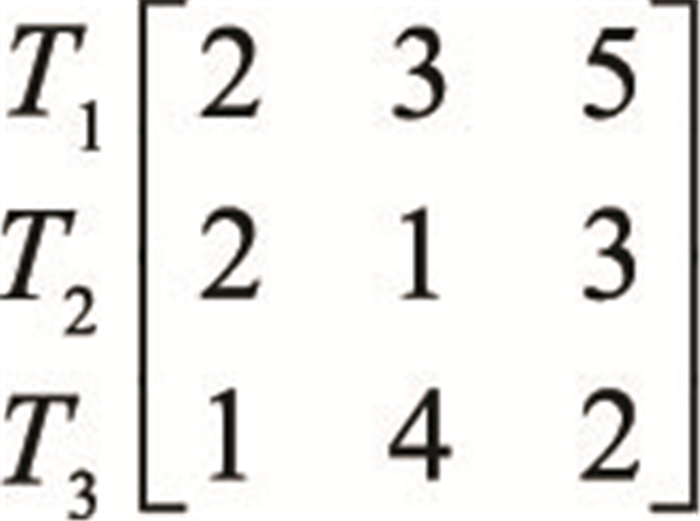
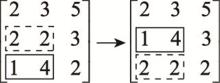
Fig.3
Position update of wandering phase"
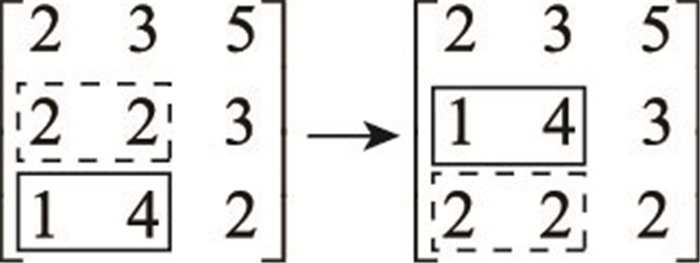

Fig.4
Position update of calling phase"

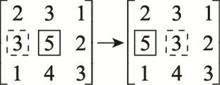
Fig.5
Position update of sieging phase"


Fig.6
Auction task release"


Fig.7
Feedback on bidding information"
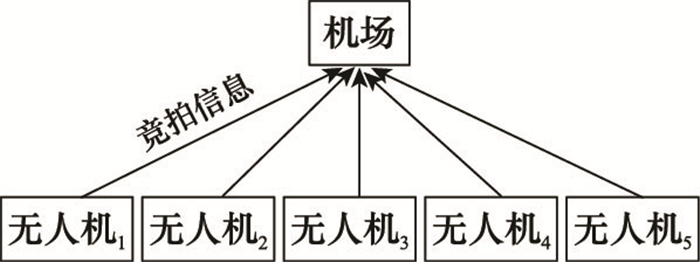

Fig.8
Signing"

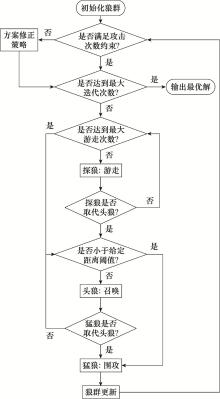
Fig.9
Flow chart of AMIWPA"
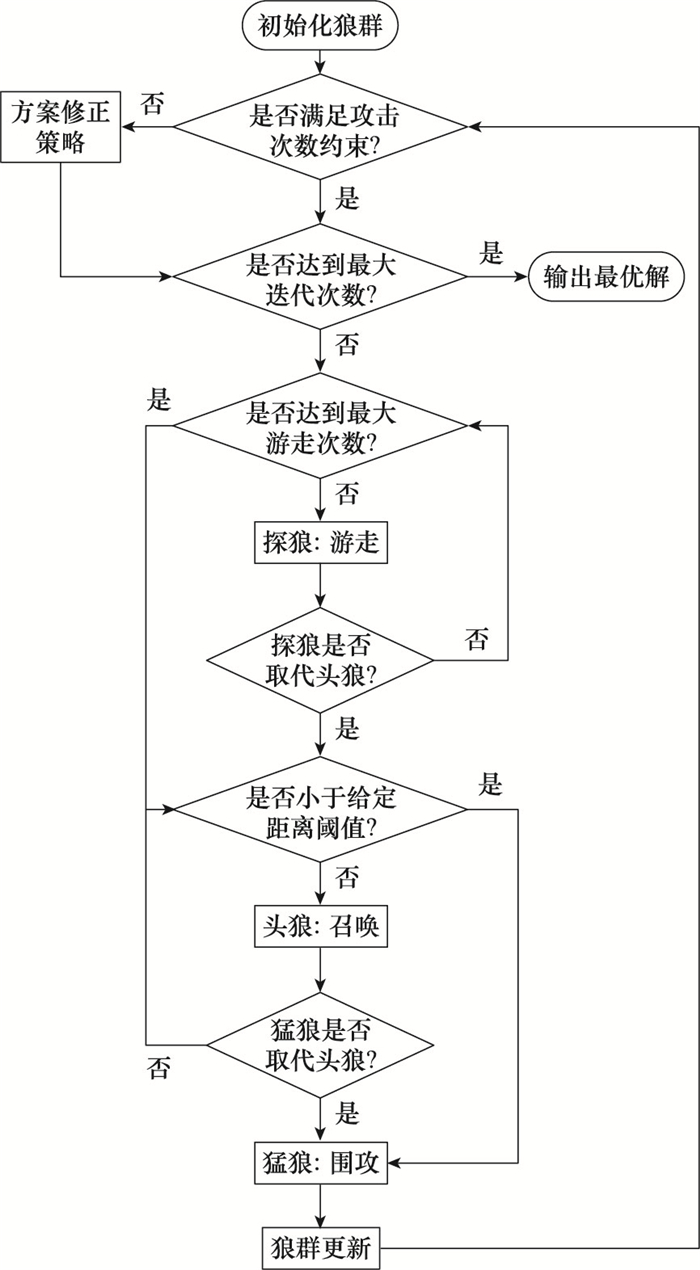
Table 3
Unmanned aerial vehicle parameter setting in case 1"
| 无人机 | 初始位置 | 能力值/% | ||
| 识别 | 攻击 | 评估 | ||
| U1 | (0, 0) | 90 | 10 | 60 |
| U2 | (0, 0) | 20 | 60 | 80 |
| U3 | (0, 0) | 50 | 60 | 70 |
| U4 | (0, 0) | 80 | 80 | 20 |
| U5 | (0, 0) | 10 | 90 | 90 |
| U6 | (0, 0) | 70 | 30 | 60 |
| U7 | (0, 0) | 20 | 60 | 80 |
| U8 | (0, 0) | 70 | 20 | 80 |
Table 4
Targets parameter setting in case 1"
| 目标 | 初始位置 | 最低需求能力值/% | ||
| 识别 | 攻击 | 评估 | ||
| T1 | (99, 57) | 70 | 40 | 50 |
| T2 | (13, 26) | 30 | 50 | 40 |
| T3 | (68, 52) | 30 | 70 | 30 |
| T4 | (97, 42) | 50 | 20 | 50 |
| T5 | (57, 24) | 10 | 60 | 60 |
Table 5
Task assignment solution in case 1"
| 无人机 | 任务序列 |
| U1 | 无 |
| U2 | (T2, 攻击) |
| U3 | (T3, 识别)→(T4, 识别)→(T1, 攻击)→(T1, 评估) |
| U4 | 无 |
| U5 | (T3, 攻击)→(T3, 评估) |
| U6 | (T1, 识别)→(T4, 攻击)→(T4, 评估) |
| U7 | (T5, 识别)→(T5, 攻击)→(T5, 评估) |
| U8 | (T2, 识别)→(T2, 评估) |
Fig.10
Unmanned aerial vehicle flight path in case 1"

Table 6
Uumanned aerial vehicle parameter setting in case 2"
| 无人机 | 初始位置 | 能力值/% | ||
| 识别 | 攻击 | 评估 | ||
| U1 | (0, 0) | 80 | 20 | 50 |
| U2 | (0, 0) | 90 | 80 | 30 |
| U3 | (0, 0) | 50 | 70 | 60 |
| U4 | (0, 0) | 70 | 80 | 10 |
| U5 | (0, 0) | 50 | 20 | 80 |
| U6 | (0, 0) | 60 | 60 | 50 |
| U7 | (0, 0) | 70 | 20 | 80 |
| U8 | (0, 0) | 90 | 70 | 20 |
| U9 | (0, 0) | 60 | 60 | 40 |
| U10 | (0, 0) | 80 | 60 | 60 |
| U11 | (0, 0) | 10 | 70 | 70 |
| U12 | (0, 0) | 80 | 40 | 70 |
| U13 | (0, 0) | 50 | 60 | 80 |
| U14 | (0, 0) | 10 | 70 | 50 |
| U15 | (0, 0) | 70 | 80 | 70 |
Table 7
Targets parameter setting in case 2"
| 目标 | 初始位置 | 最低需求能力值/% | ||
| 识别 | 攻击 | 评估 | ||
| T1 | (18, 18) | 60 | 50 | 40 |
| T2 | (35, 119) | 60 | 50 | 30 |
| T3 | (166, 84) | 50 | 30 | 50 |
| T4 | (94, 81) | 60 | 30 | 60 |
| T5 | (239, 45) | 80 | 30 | 20 |
| T6 | (283, 51) | 50 | 20 | 20 |
| T7 | (142, 12) | 60 | 70 | 30 |
| T8 | (293, 103) | 50 | 50 | 30 |
| T9 | (293, 134) | 40 | 80 | 40 |
| T10 | (284, 245) | 30 | 30 | 60 |
Table 8
Task assignment solution in case 2"
| 无人机 | 任务序列 |
| U1 | 无 |
| U2 | (T5, 识别)→(T9, 识别)→(T9, 攻击) |
| U3 | (T1, 攻击)→(T1, 评估) |
| U4 | (T1, 识别)→(T10, 识别)→(T10, 攻击) |
| U5 | 无 |
| U6 | (T4, 识别)→(T4, 攻击) |
| U7 | (T4, 评估) |
| U8 | (T7, 识别)→(T7, 攻击) |
| U9 | (T8, 识别)→(T8, 攻击)→(T8, 评估)→(T9, 评估) |
| U10 | 无 |
| U11 | (T5, 攻击)→(T5, 评估) |
| U12 | (T3, 识别)→(T3, 攻击)→(T3, 评估)→(T10, 评估) |
| U13 | (T6, 识别)→(T6, 攻击)→(T6, 评估) |
| U14 | 无 |
| U15 | (T2, 识别)→(T2, 攻击)→(T2, 评估) |
Fig.11
Unmanned aerial vehicle flight path in case 2"
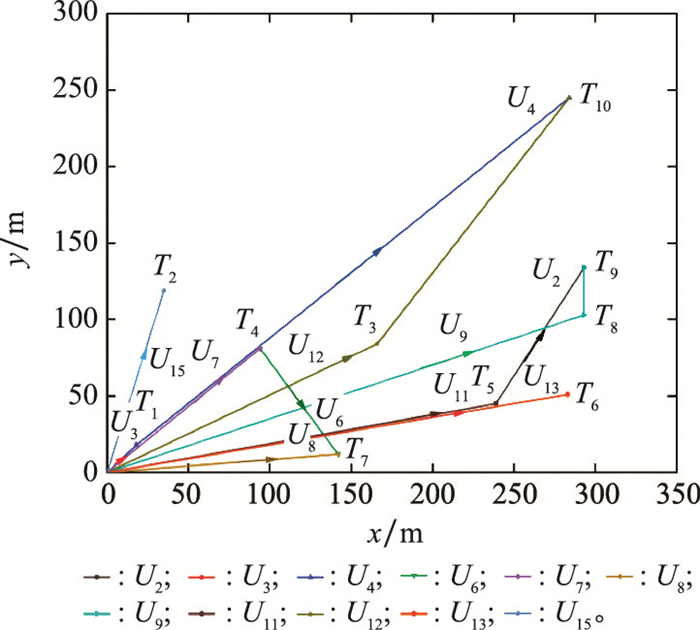
Table 9
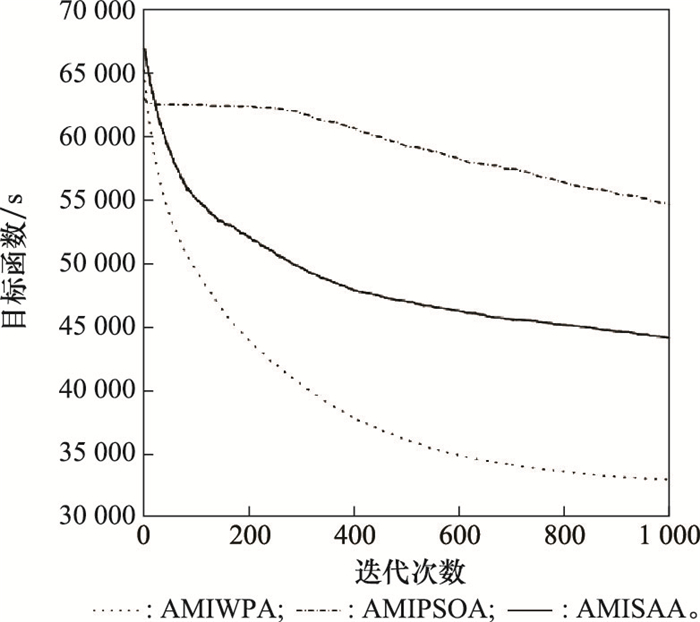
Objective function values of the obtained by running three algorithms twenty times in case 3 s"
| 算法 | fbest | fworst | favg | std | Tavg |
| AMIWPA | 32 119.95 | 34 269.15 | 33 155.61 | 673.87 | 347.32 |
| AMIPSOA | 53 958.71 | 55 466.04 | 54 797.71 | 989.30 | 631.59 |
| AMISAA | 42 302.04 | 46 615.64 | 44 203.33 | 1 016.28 | 573.35 |
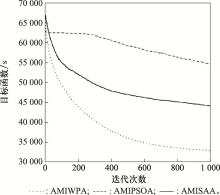
Fig.12
Convergence curve comparison of three algorithms in case 3"
| 1 | XU J, GAO Q, XIAO L, et al. Autonomous decision-making method for combat mission of UAV based on deep reinforcement learning[C]//Proc. of the IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference, 2019. |
| 2 |
岳源, 屈高敏. 分布式多无人机协同侦察目标分配研究[J]. 兵器装备工程学报, 2018, 39 (3): 57- 61.
doi: 10.11809/bqzbgcxb2018.03.012 |
|
YUE Y , QU G M . Research on target allocation of distributed multi-UAV cooperative reconnaissance[J]. Journal of Ordnance Equipment Engineering, 2018, 39 (3): 57- 61.
doi: 10.11809/bqzbgcxb2018.03.012 |
|
| 3 |
CHEN W , LIU J J , GUO H Z , et al. Toward robust and intelligent drone swarm: challenges and future directions[J]. IEEE Network, 2020, 34 (4): 278- 283.
doi: 10.1109/MNET.001.1900521 |
| 4 |
FRASER C , BERTUCCELLI L , CHOI H . A hyperparameter consensus method for agreement under uncertainty[J]. Automatica, 2012, 48 (2): 374- 380.
doi: 10.1016/j.automatica.2011.11.003 |
| 5 |
ZOU D X , LIU H K , GAO L Q , et al. An improved differential evolution algorithm for the task assignment problem[J]. Engineering Application of Artificial Intelligence, 2011, 24 (4): 616- 624.
doi: 10.1016/j.engappai.2010.12.002 |
| 6 |
ZHANG J , XING J H . Cooperative task assignment of multi-UAV system[J]. Chinese Journal of Aeronautics, 2020, 33 (11): 2825- 2827.
doi: 10.1016/j.cja.2020.02.009 |
| 7 | 林君灿, 贾高伟, 侯中喜. 异构UAV编队反雷达作战中任务分配方法[J]. 系统工程与电子技术, 2018, 40 (9): 1986- 1992. |
| LIN J C , JIA G W , HOU Z X . Research on task assignment of heterogeneous UAV formation in the anti-radar combat[J]. Systems Engineering and Electronics, 2018, 40 (9): 1986- 1992. | |
| 8 | ALIGHANBARI M, HOW J P. Cooperative task assignment of unmanned aerial vehicles in adversarial environments[C]//Proc. of the American Control Conference, 2005. |
| 9 | OH G , KIM Y , AHN J , et al. Market-based task assignment for cooperative timing missions in dynamic environments[J]. Journal of Intelligent & Robotic Systems, 2017, 87, 97- 123. |
| 10 |
THI H , NGUYEN D , DINH T . Globally solving a nonlinear UAV task assignment problem by stochastic and deterministic optimization approaches[J]. Optimization Letters, 2012, 6 (2): 315- 329.
doi: 10.1007/s11590-010-0259-x |
| 11 | 马云红, 井哲, 周德云. 一种任务分配问题的快速剪枝优化算法[J]. 西北工业大学学报, 2013, 31 (1): 40- 43. |
| MA Y H , JING Z , ZHOU D Y . A fast pruning optimization algorithm for task assignment problem[J]. Journal of Northwestern Polytechnical University, 2013, 31 (1): 40- 43. | |
| 12 | 张驰. 无人机任务分配仿真平台设计与研究[D]. 西安: 西安电子科技大学, 2014. |
| ZHANG C. Design and research of UAV task assignment si-mulation platform[D]. Xi'an: Xidian University, 2014. | |
| 13 |
张瑞鹏, 冯彦翔, 杨宜康. 多无人机协同任务分配混合粒子群算法[J]. 航空学报, 2021,
doi: 10.7527/S1000-6893.2021.26011 |
|
ZHANG R P , FENG Y X , YANG Y K . Hybrid particle swarm algorithm for multi-UAV cooperative task allocation[J]. Acta Aeronautica et Astronautica Sinica, 2021,
doi: 10.7527/S1000-6893.2021.26011 |
|
| 14 |
DENG Q B , YU J Q , MEI Y S . Deadlock-free consecutive task assignment of multiple heterogeneous unmanned aerial vehicles[J]. Journal of Aircraft, 2014, 51 (2): 596- 605.
doi: 10.2514/1.C032309 |
| 15 |
HU C F , ZHANG Z L , YANG N , et al. Fuzzy multiobjective cooperative surveillance of multiple UAVs based on distributed predictive control for unknown ground moving target in urban environment[J]. Aerospace Science and Technology, 2019, 84, 329- 338.
doi: 10.1016/j.ast.2018.10.017 |
| 16 | SHIMA T , RASMUSSEN S , SPARKS A , et al. Multiple task assignments for cooperating uninhabited aerial vehicles using genetic algorithms[J]. Computers & Operations Research, 2006, 33 (11): 3252- 3269. |
| 17 |
KURDI H , ALDAOOD M , Al-MEGREN S , et al. Adaptive task allocation for multi-UAV systems based on bacteria foraging behaviour[J]. Applied Soft Computing, 2019, 83, 105643.
doi: 10.1016/j.asoc.2019.105643 |
| 18 | BELLO-ORGAZ G , RAMIREZ-ATENCIA C , FRADERA-GIL J , et al. GAMPP: genetic algorithm for UAV mission planning problems[M]. Madrid: Springer International Publishing, 2016. |
| 19 | WU X L , YIN Y N , XU L , et al. Multi-UAV task allocation based on improved genetic algorithm[J]. IEEE Access, 2021, 9, 369- 379. |
| 20 | 苏菲, 陈岩, 沈林成. 基于蚁群算法的无人机协同多任务分配[J]. 航空学报, 2008, 29 (S1): 184- 191. |
| SU F , CHEN Y , SHEN L C . UAV cooperative multi-task assignment based on ant colony algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29 (S1): 184- 191. | |
| 21 | ZHEN Z Y , YAN C , WEN L D , et al. An intelligent cooperative mission planning scheme of UAV swarm in uncertain dynamic environment[J]. Aerospace Science and Technology, 2020, 100 (13): 1005826. |
| 22 | ZHANG X Y , LU X Y , JIA S , et al. A novel phase angle-encoded fruit fly optimization algorithm with mutation adaptation mechanism applied to UAV path planning[J]. Applied Soft Computing, 2018, 70, 371- 388. |
| 23 | SUJIT P, GEORGE J, BEARD R. Multiple UAV task allocation using particle swarm optimization[C]//Proc. of the Navigation and Control Conference, 2006. |
| 24 | 周同乐, 陈谋, 朱荣刚, 等. 基于狼群算法的多无人机协同多目标攻防满意决策方法[J]. 指挥与控制学报, 2020, 6 (3): 251- 256. |
| ZHOU T L , CHEN M , ZHU R G , et al. A multi-UAV collaborative multi-objective attack and defense satisfactory decision method based on wolf pack algorithm[J]. Journal of Command and Control, 2020, 6 (3): 251- 256. | |
| 25 | GAO C , ZHEN Z Y , GONG H J . A self-organized search and attack algorithm for multiple unmanned aerial vehicles[J]. Aerospace Science and Technology, 2016, 54, 229- 240. |
| 26 | GAO S , WU J Z , AI J . Multi-UAV reconnaissance task allocation for heterogeneous targets using grouping ant colony optimization algorithm[J]. Soft Computing, 2021, 25 (5): 7155- 7167. |
| 27 | LUO R B , ZHENG H X , GUO J F . Solving the multi-functional heterogeneous UAV cooperative mission planning problem using multi-swarm fruit fly optimization algorithm[J]. Sensors, 2020, 20 (18): 5026. |
| 28 | 蒋硕, 袁小平. 改进PSO算法在多无人机协同任务分配中的应用[J]. 计算机应用研究, 2019, 36 (11): 3344- 3360. |
| JIANG S , YUAN X P . Application of improved PSO algorithm in multi-UAV cooperative task assignment[J]. Computer Application Research, 2019, 36 (11): 3344- 3360. | |
| 29 | 吴虎胜, 张凤鸣, 吴庐山. 一种新的群体智能算法——狼群算法[J]. 系统工程与电子技术, 2013, 35 (11): 2430- 2438. |
| WU H S , ZHANG F M , WU L S . A new swarm intelligence algorithm-wolf pack algorithm[J]. Systems Engineering and Electronics, 2013, 35 (11): 2430- 2438. | |
| 30 | CHEN H W, XU J Y, WU C. Multi-UAV task assignment based on improved wolf pack algorithm[C]//Proc. of the International Conference on Cyberspace Innovation of Advanced Technologies, 2020. |
| 31 | CHEN Y B , YANG D , YU J Q . Multi-UAV task assignment with parameter and time-sensitive uncertainties using modified two-part wolf pack search algorithm[J]. IEEE Trans.on Aerospace and Electronic Systems, 2018, 54 (6): 2853- 2872. |
| 32 | LU Y T , MA Y F , WANG J Y , et al. Task assignment of UAV swarm based on wolf pack algorithm[J]. Applied Sciences, 2020, 10 (23): 8335. |
| [1] | FU Xiaowei, FENG Peng, GAO Xiaoguang, LIU Zhong. Conflict resolution in multi-UAV cooperative tasks assignment withcommunication delay [J]. Systems Engineering and Electronics, 2018, 40(7): 1491-1497. |
| [2] | MENG Xiangfei, WANG Ying, QI Yao, LV Maolong, LI Chao. New method for I-UMOP problem based on PEV principle [J]. Systems Engineering and Electronics, 2018, 40(2): 338-345. |
| [3] | LIU Xing, YUAN Chao-wei, YANG Zhen, LI Zhen-jun. VM dynamic scheduling algorithm for mobile cloud computing [J]. Systems Engineering and Electronics, 2015, 37(9): 2176-2181. |
| [4] | Improved binary wolf pack algorithm for solving . Improved binary wolf pack algorithm for solving #br# multidimensional knapsack problem [J]. Systems Engineering and Electronics, 2015, 37(5): 1084-1091. |
| [5] | ZHUO Zhen-fu, YANG Yong-jian, FAN Xiao-guang, WANG Sheng-da,NAN Jian-guo, WANG Jiu-chong. Array antennas pattern synthesis based on improved dichotomy particle swarm optimization [J]. Systems Engineering and Electronics, 2015, 37(11): 2460-2466. |
| [6] | WU Hu-sheng, ZHANG Feng-ming, ZHAN Ren-jun, WANG Song, ZHANG Chao. A binary wolf pack algorithm for solving 0-1 knapsack problem [J]. Systems Engineering and Electronics, 2014, 36(8): 1660-1667. |
| [7] | LIU Yue-feng, ZHANG An. Cooperative task assignment method of manned/unmanned aerial vehicle formation [J]. Journal of Systems Engineering and Electronics, 2010, 32(3): 584-587. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||