Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (3): 773-778.doi: 10.12305/j.issn.1001-506X.2021.03.22
• Guidance, Navigation and Control • Previous Articles Next Articles
Analysis and suppression of the limit cycle about electric actuator
Zhiming ZHOU( ), Fan LIN(), Xiaoxian YAO(), Xiaodong SONG()
), Fan LIN(), Xiaoxian YAO(), Xiaodong SONG()
- School of Aerospace and Engineering, Beijing Institute of Technology, Beijing 100081, China
-
Received:2020-06-01Online:2021-03-01Published:2021-03-16
CLC Number:
Cite this article
Zhiming ZHOU, Fan LIN, Xiaoxian YAO, Xiaodong SONG. Analysis and suppression of the limit cycle about electric actuator[J]. Systems Engineering and Electronics, 2021, 43(3): 773-778.
share this article

Fig.1
Structure diagram of electric actuator"
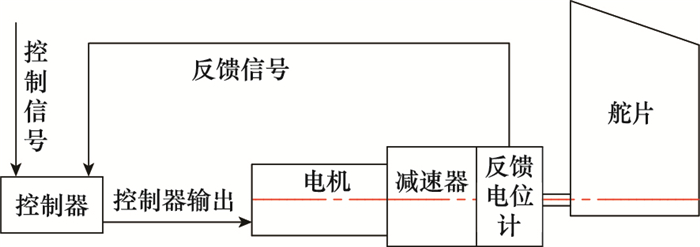
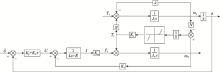
Fig.2
Block diagram of actuator's transmission structure"


Fig.3
Block diagram of simplified actuator"

Table 1
Parameter used in the simulation"
| 参数名称 | 参数值 |
| 电机转动惯量Jm/(kg·m2) | 2.496 1e-9 |
| 舵片转动惯量Jl/(kg·m2) | 0.1×2.496 1e-5 |
| 电阻R/Ω | 7.8 |
| 反电动势系数Ke/(V·s/rad) | 0.002 5 |
| 电磁力矩系数Km/(N·m/A) | 0.002 5 |
| 减速器等效刚度Ks/(N·m/rad) | 10 |
| 减速比N | 100 |
| 间隙值2b/rad | 2π/180 |

Fig.4
Response of the actuator under different coefficients"
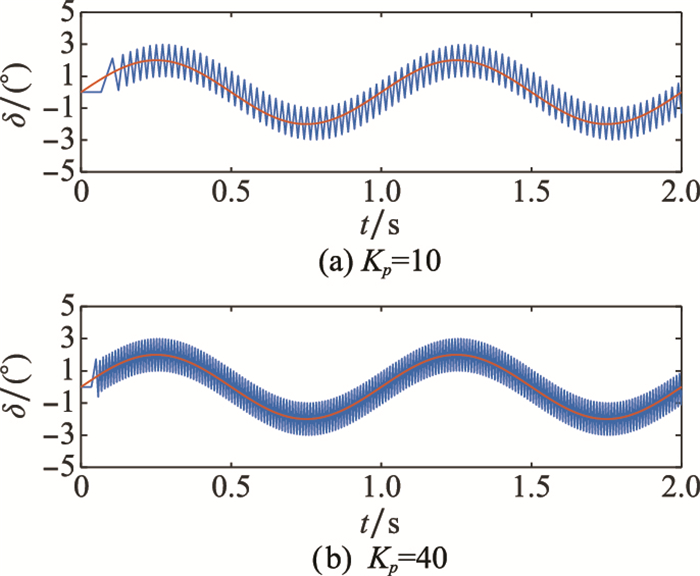

Fig.5
Response of the actuator under different coefficients with thefriction considered"
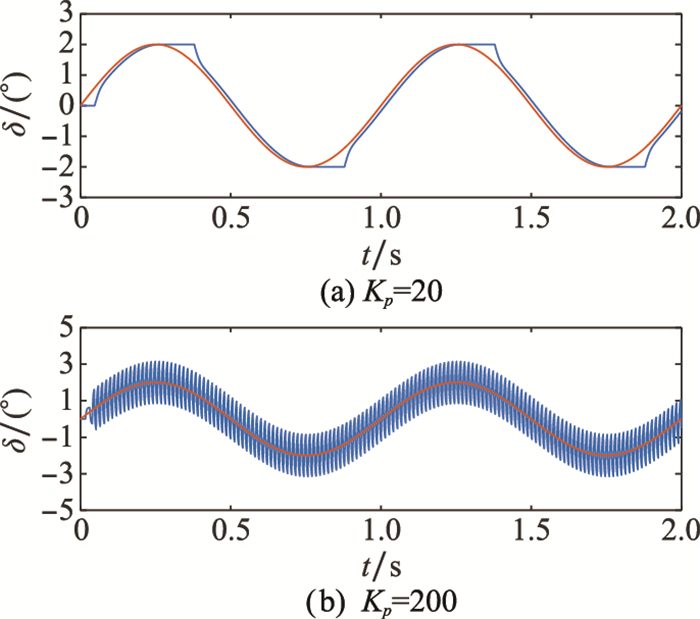
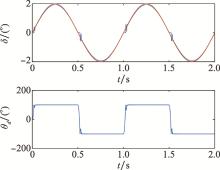
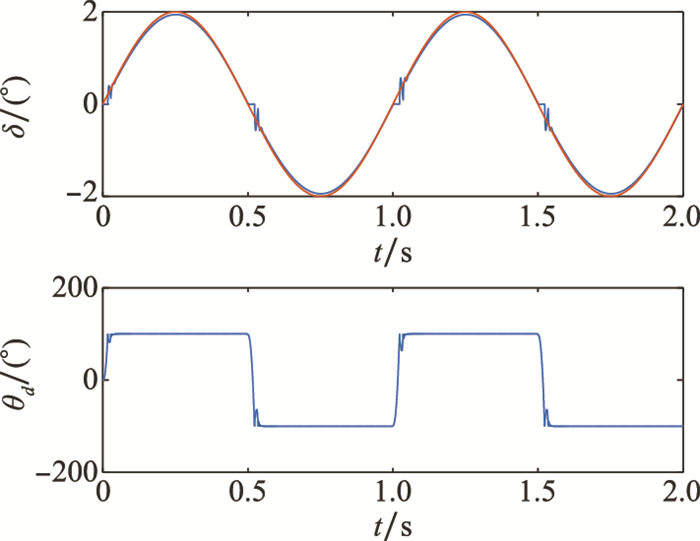
Fig.6
Response of the actuator and the differential angle under the feedback moment"
| 1 | KIM J , WHANG I H . Augmented three-loop autopilot structure based on mixed-sensitivity optimization[J]. Journal of Guidance, Control, and Dynamics, 2018, 43 (3): 748- 753. |
| 2 | 周伟.旋转弹动态稳定性与鲁棒变增益控制[D].北京: 北京理工大学, 2016: 27-31. |
| ZHOU W. Dynamic stability and robust gain-scheduling control of spinning missiles[D]. Beijing: Beijing Institute of Technology, 2016: 27-31. | |
| 3 |
ZHOU W , YANG S X , DONG J L . Coning motion instability of spinning missiles induced by hinge moment[J]. Aerospace Science and Technology, 2013, 30 (1): 239- 245.
doi: 10.1016/j.ast.2013.08.008 |
| 4 | YOUSOF K , MOHAMMAD R A , AHMAD R V , et al. Dynamic stability conditions for a rolling flight vehicle applying continuous actuator[J]. Aerospace Science and Technology, 2015, 30, 451- 458. |
| 5 | 王婷, 张昆峰, 武飞. 基于模型的舵机非线性因素补偿控制研究[J]. 航空兵器, 2018, (2): 34- 37. |
| WANG T , ZHANG K F , WU F . Study of model-based nonlinear compensate control for the servo system[J]. Aero Weaponry, 2018, (2): 34- 37. | |
| 6 | 黄立梅, 吴成富, 马松辉. 抑制飞控系统舵机间隙影响的非线性补偿器设计[J]. 飞行力学, 2012, 30 (2): 132- 138. |
| HUANG L M , WU C F , MA S H . Design of a nonlinear compensator for depressing the influence ofactuator's clearance in flight control system[J]. Flight Dynamics, 2012, 30 (2): 132- 138. | |
| 7 |
ZHOU W , YANG S X , ZHAO L Y . Limit cycle of low spinning projectiles induced by the backlash of actuators[J]. Aerospace Science and Technology, 2017, 69, 595- 601.
doi: 10.1016/j.ast.2017.07.030 |
| 8 | 李宗星, 张锐. 带有死区环节的电动舵机鲁棒控制技术[J]. 现代防御技术, 2019, 47 (3): 64- 70. |
| LI Z X , ZHANG R . Robust control of electric steering engine with dead zone[J]. Modern Defense Technology, 2019, 47 (3): 64- 70. | |
| 9 |
NORDIN M , GUTMAN P O . Controlling mechanical systems withbacklash-a survey[J]. Automatica, 2002, 38 (10): 1633- 1649.
doi: 10.1016/S0005-1098(02)00047-X |
| 10 | DEAN S R H, SURGENOR B W, IORDANOU H N. Experimental evaluation of a backlash inverter as applied to a servomotor with gear train[C]//Proc.of the 4th IEEE Conference on Control Applications, 1995: 580-585. |
| 11 |
WANG C , YANG M , ZHENG W L , et al. Analysis and suppression of limit cycle oscillation for transmission system with backlash nonlinearity[J]. IEEE Trans.on Industrial Electro-nics, 2017, 64 (12): 9261- 9270.
doi: 10.1109/TIE.2017.2711564 |
| 12 |
YANG M , WANG C , XU D G , et al. Shaft torque limiting control using shaft torque compensator for two-inertia elastic system with backlash[J]. IEEE/ASME Trans.on Mechatronics, 2016, 21 (6): 2902- 2911.
doi: 10.1109/TMECH.2016.2571304 |
| 13 | MASOUD A E, MAAS J. Limit cycle analysis for drive systems with backlash nonlinearity using an eigenvalue method[C]//Proc.of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 2019: 1409-1414. |
| 14 | HEYNS L J , KRUGER J J . Describing function-based analysis of a nonlinear hydraulic transmission line[J]. IEEE Trans.on Control Systems Technology, 1992, 2 (1): 31- 35. |
| 15 |
DUARTE F B , MACHADO J T . Describing function of two masses with backlash[J]. Nonlinear Dynamics, 2009, 56 (4): 409- 413.
doi: 10.1007/s11071-008-9410-y |
| 16 | TIERNO J E, KIM K Y, LACY S L, et al. Describing function analysis of an anti-backlash controller[C]//Proc.of the American Control Conference, 2000: 4164-4168. |
| 17 | WANG C, YANG M, ZHENG W L, et al. Analysis of limit cycle mechanism for two-mass system with backlash nonlinearity[C]//Proc.of the 42nd IECON Annual Conference of the IEEE Industrial Electronics Society, 2016: 500-505. |
| 18 | MENG X F , WANG Y , LYU M L . Adaptive NN control for multisteering plane aircraft with dead zone or backlash input nonlinearity[J]. Mathematical Problems in Engineering, 2017, (4): 4684303. |
| 19 | YANG L , LIU Z , ZHANG Y . Robust fuzzy adaptive yaw moment control of humanoid robot with unknown backlash nonlinearity[J]. IEEE/CAA Journal of Automatica Sinica, 2017, 1- 13. |
| 20 | MA D Q , LIN H , LI B Q . Chattering-free sliding-mode control for electromechanical actuator with backlash nonlinearity[J]. Journal of Electrical and Computer Engineering, 2017, (3): 6150750. |
| 21 | LEI L , LI T . Partial state constraints-based control for nonli-near systems with backlash-like hysteresis[J]. IEEE Trans.on Systems Man & Cybernetics Systems, 2018, 3100- 3104. |
| 22 | YAN L M , JIN H , DAN Z . Adaptive compensation of backlash nonlinearity for servo systems[J]. Journal of System Simulation, 2009, (21): 1498- 1501. |
| 23 | SUN G F , XU Y M . Finite-time observer-based adaptive control of switched system with unknown backlash-like hysteresis[J]. Complexity, 2019, (12): 3760401. |
| 24 | LYU W S , FANG W . Adaptive fuzzy finite-time control for uncertain nonlinear systems with asymmetric actuator backlash[J]. International Journal of Fuzzy Systems, 2018, (21): 50- 59. |
| 25 | LYU Z , LIU Z , XIE K , et al. Adaptive tracking control for switched nonlinear systems with fuzzy actuator backlash[J]. Fuzzy Sets and Systems, 2020, (385): 60- 80. |
| 26 |
ROSTITI C , LIU Y X , CANOVA M , et al. A backlash compensator for drivability improvement via real-time model predictive control[J]. Journal of Dynamic Systems Measurement and Control, 2018, 140 (10): 104501.
doi: 10.1115/1.4039562 |
| 27 | DOU L H , DONG L X , CHEN J , et al. Predictive control for mechanical system with backlash based on hybrid model[J]. Journal of Systems Engineering and Electronics, 2009, 20 (6): 1301- 1308. |
| 28 | DONG R L , TAN Q Y , TAN Y H . A nonsmooth nonlinear programming based predictive control for mechanical servo systems with backlash-like hysteresis[J]. Asian Journal of Control Affiliated with Acpa the Asian Control Professors Association, 2018, 20 (4): 1519- 1532. |
| 29 | ZHAO H B , WANG C G . A new adaptive control of dual-motor driving servo system with backlash nonlinearity[J]. Indian Academy of Sciences, 2018, 43, 155. |
| 30 | ZHAO H B , WANG C G . Projection algorithm-based dynamic surface control of dual-motor driving servo system with backlash nonlinearity[J]. IEEE Trans.on Fundamentals of Electronics Communications with Computer Sciences, 2018, 101 (10): 1646- 1657. |
| [1] | Yude NI, Ling ZOU, Ruihua LIU, Wantong CHEN, Zhe QIN, Kai WANG. C-band navigation signal modulation mode and performance evaluation of BeiDou system [J]. Systems Engineering and Electronics, 2022, 44(12): 3800-3810. |
| [2] | Yiqiang TANG, Xiaopeng YANG, Shengming ZHU. Low-orbit satellite channel prediction algorithm based on the hybrid CNN-BiLSTM using attention mechanism [J]. Systems Engineering and Electronics, 2022, 44(12): 3863-3870. |
| [3] | Zhiming ZHOU, Zhen LIU, Jianqiang YI, Xiaoxian YAO. Stability of missile damping loop under actuator dynamic response [J]. Systems Engineering and Electronics, 2022, 44(10): 3200-3206. |
| [4] | Yingying JIANG, Shuguo PAN, Fei YE, Wang GAO, Chun MA, Hao WANG. Approach for detection of slowly growing fault based on robust estimation and improved AIME [J]. Systems Engineering and Electronics, 2022, 44(9): 2894-2902. |
| [5] | Haolun GU, Guorong ZHAO, Jinbo YAO, Chao GAO. Cross layer MAC protocol design of NNSs based on graded nodes [J]. Systems Engineering and Electronics, 2022, 44(7): 2329-2340. |
| [6] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [7] | Zhe LIANG, Zhaofa ZHOU, Zhihao XU, Wenting LYU, Hui DUAN. Angular rate attitude algorithm based on multi-interval information correction [J]. Systems Engineering and Electronics, 2022, 44(5): 1636-1643. |
| [8] | Junbao WEI, Haiyan LI, Jing LI. Novel backstepping control for hypersonic vehicle with angle of attack constraint [J]. Systems Engineering and Electronics, 2022, 44(4): 1310-1317. |
| [9] | Fenghua XIANG, Binfeng YANG, Bo LI, Zhen ZHAO, Jiaojiao GUO. Target orientation mechanism based on heart-shaped modulated magnetic signal [J]. Systems Engineering and Electronics, 2022, 44(4): 1113-1119. |
| [10] | Yajie XU, Yong XIAN, Bangjie LI, Leliang REN, Shaopeng LI, Weilin GUO. Method for improving the precision of hypersonic vehicle inertial navigation system based on neural network [J]. Systems Engineering and Electronics, 2022, 44(4): 1301-1309. |
| [11] | Xuping GU, Daquan TANG. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm [J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. |
| [12] | Wei FANG, Yu WANG, Wenjun YAN, Chong LIN. Symbolized flight action recognition based on neural network [J]. Systems Engineering and Electronics, 2022, 44(3): 737-745. |
| [13] | Xiaowei FU, Jing PAN. Distributed formation control of UAV swarm with dynamic obstacle avoidance [J]. Systems Engineering and Electronics, 2022, 44(2): 529-537. |
| [14] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [15] | Shuo LI, Shaojie ZHANG, Peng YAN, Han ZHANG, Ke LU. LPV control for helicopter maneuvering flight considering input saturation [J]. Systems Engineering and Electronics, 2022, 44(2): 637-643. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||